比起单纯把算法跑出来,我更想看到它“是怎么跑的”。于是这个小项目最后就变成了一个路径搜索算法演示器。
写在前面
这是我在《算法设计与优化》课设里做的一个小软件,题目方向是无人机路径搜索与优化。更准确一点说,它并不只是“实现一个 A* 算法”,而是想把常见路径规划算法做成一个可交互、可视化、方便演示的小工具。
这篇文章其实在 2023 年底就写过一版了,不过当时演示内容一直没补完整。前段时间刚好抽空把一些演示 GIF 和细节重新整理了一下,所以索性重发一次,也顺手把内容按现在的新博客框架重新收拾一下。
从完成度上看,这个项目当然算不上多成熟。它更像是一个带界面的算法实验场:可以自己画地图、设置起点终点和障碍物,切换不同算法,看它们怎么搜索、怎么扩展节点、最后怎么得到路径。对课设展示来说,这种“看得见过程”的形式,比单纯打印几行结果要直观得多。
项目环境与界面
项目基于 Qt 框架,使用 C++ 开发,开发环境如下:
- OS:Windows
- IDE:Qt Creator
- Language:C++
- Framework:Qt
主界面长这样:
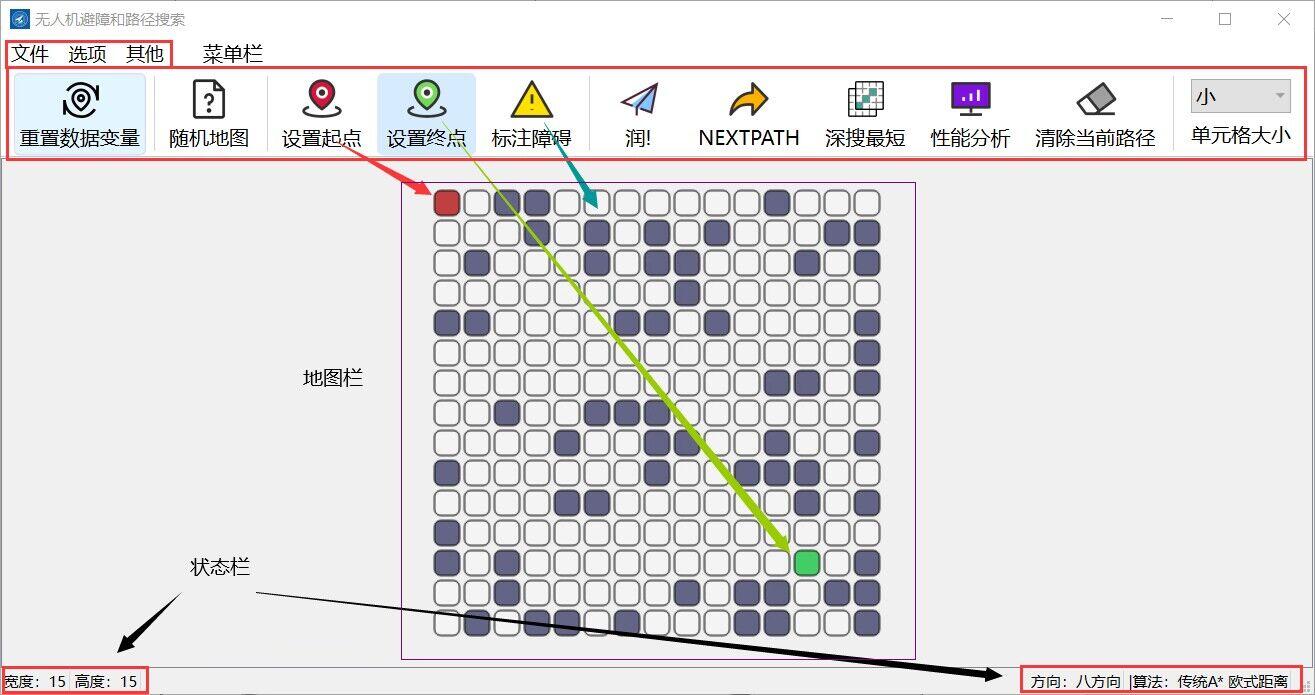
界面本身没有什么特别高深的设计,主要目标还是围绕“演示”服务:地图区域尽量清晰,工具栏操作尽量直接,底部状态栏可以辅助调试,算法执行结果则尽量用颜色、路径和节点状态展示出来。说白了,它不是一个追求工业级美观的产品,而是一个偏实用的教学和展示工具。
这个项目能做什么
如果只看名字,“A* 算法演示器”听起来好像功能不多,但实际做着做着,还是往里面塞了不少东西。
先说地图交互这部分。项目支持自定义地图宽高,单元格大小也可以调整;起点、终点、障碍物都能手动设置;绘制好的地图支持保存成本地 .Amap 文件,方便下次直接载入,不用每次都现场手画。为了让演示过程更灵活,我还加了随机地图、导入背景图、清除背景图这些功能,虽然有些地方做得还比较粗糙,但至少把“可操作性”这一块补上了。
算法部分则不止 A* 一种。我把自己当时课设里涉及到的一些经典搜索算法都做进去了,包括:
- 深度优先搜索(DFS)
- 广度优先搜索(BFS)
- Dijkstra 算法
- 最佳优先搜索
- 传统 A* 算法
- 双向 A* 算法
- 优化版 A* 算法
- 三种增量式搜索算法(这一部分还不够完善)
其中我自己投入最多的,还是优化版 A* 这一块。为了让它更有“可调参数”的感觉,我加入了几种不同的启发式距离定义,包括切比雪夫距离、曼哈顿距离和欧几里得距离;同时还加入了动态权重、拐角代价和安全距离模式等参数,方便观察不同策略对最终路径结果的影响。
严格来说,这些优化还谈不上多么系统,更多还是面向课设场景下的一种工程化尝试:既想让它比“最原始版本”更灵活一点,又希望界面上能比较直观地把差异体现出来。
如何获取与使用
源码我放在 GitHub 上了,直接下载或者克隆都可以。
如果你习惯直接拉仓库,也可以用下面这条命令:
git clone git@github.com:JJLibra/Astar.git
考虑到 GitHub 访问有时候比较慢,我当时也顺手留了一个网盘备份,不过网盘里通常只放最新版代码:
下载源码之后,比较推荐直接用 Qt Creator 打开项目里的 Astar.pro 工程文件。这样最省事,也方便你顺手改代码做二次开发。
如果只是想在 Windows 下打包成可执行文件,我当时用的是 Enigma Virtual Box。这块不是本文重点,就不展开讲了,有需要的话可以自己搜相关教程。
一些实际演示
因为图床和流量原因,下面这些 GIF 的画质会有一点压缩。实际运行时的界面观感会比动图里更顺一点。
先是最基础的地图设置。这个项目支持自由设置地图大小,然后在网格里标记起点、终点和障碍物。整个交互其实不复杂,但对演示来说已经够用了:

下面这个是优化版 A* 的演示,同时还把贝塞尔曲线作为最终轨迹做了绘制。也就是说,程序给出的原始路径并不是最后的展示结果,我又额外做了一层平滑处理,让它看起来更像“无人机轨迹”而不是简单折线:
随机地图和一键重置也加进去了。这里的随机地图逻辑其实比较朴素,就是基于伪随机数去生成障碍,严格来说还不够聪明,不能保证每次都生成存在可行解的地图。这个地方如果以后要继续做,我觉得最值得优先重构的就是它:

为了适配课设答辩这种场景,我还做了地图保存功能。毕竟现场再一点点手画地图既费时间,也容易翻车,提前把测试地图存好显然更稳:
载入地图同样是支持的。下面这个演示里还顺便展示了深度优先搜索。这里有个小插曲:录视频的时候我忘了演示“深搜最短”这个按钮,实际它是能工作的,只是操作时要稍微按顺序来,不然有些状态切换容易把自己绕晕:
背景图导入这个功能,本来是我给“地图栅格化”留的一个过渡方案。原本我确实想继续往“真实地图栅格化”方向做,但当时课设时间已经有点紧了,最后就退一步,先支持导入本地图片作为背景,再手动在上面描地图。虽然只是个折中方案,但至少把这个思路跑通了:
除此之外,还有一些不太显眼、但我自己当时做得挺上头的小细节,比如关于页、性能分析可视化、状态栏提示、操作反馈,以及一些不太成熟但多少有点意思的界面动画:
做这个项目时的一些取舍
现在回头看,这个项目其实挺典型:想做的东西很多,真正能在课设周期里做完的东西却很有限。
比如我原本很想把“真实地图栅格化”“更稳定的随机地图生成”“增量式搜索算法的完整交互”这些部分做扎实,但最后都只能在时间、复杂度和展示效果之间做妥协。于是项目里就出现了很多这种状态:功能已经有雏形,能演示,也能跑,但还远没到我自己心里那个“做舒服了”的程度。
很多学生项目最后的样子,都不是“全做完了”,
而是“在截止日期之前,把最值得展示的部分先做出来了”。
所以如果你下载代码以后,看到里面有些写法不太规范、某些逻辑有点糙、局部实现带着明显的课设味道,也不用太意外。这个项目本来就是一边学、一边试、一边补出来的。小细节不少,bug 其实也不少,改到后面代码确实有点朝着“能跑就先别动”那个方向滑过去了。
最后
由于这个项目本身是学校课设,所以里面有些图标素材会带一点校内元素。如果你只是想参考算法实现、界面思路或者工程组织方式,直接看源码就够了;如果你想要一个更早期、相对更原始的版本,我也可以单独提供。
总之,这个项目的定位一直都很明确:它不是一个成熟产品,而是一个把路径搜索算法“做给人看”的小工具。对我来说,它最大的意义不只是把 A* 写出来,而是把算法、界面、交互和演示这一整套流程都亲手串了一遍。
如果你正好对这个项目感兴趣,或者准备拿它做一点自己的二次开发,欢迎去仓库里看看。
当然,别忘了顺手点个免费的 Star,这个对学生项目来说还是很有鼓励意义的。
评论区
评论加载中...